




















高精度5轴加工316L不锈钢机器人关节,阳极氧化|ISO2768-F标准
1件可以|没有最小起订量。原型和快速小批量的CNC加工。即时报价

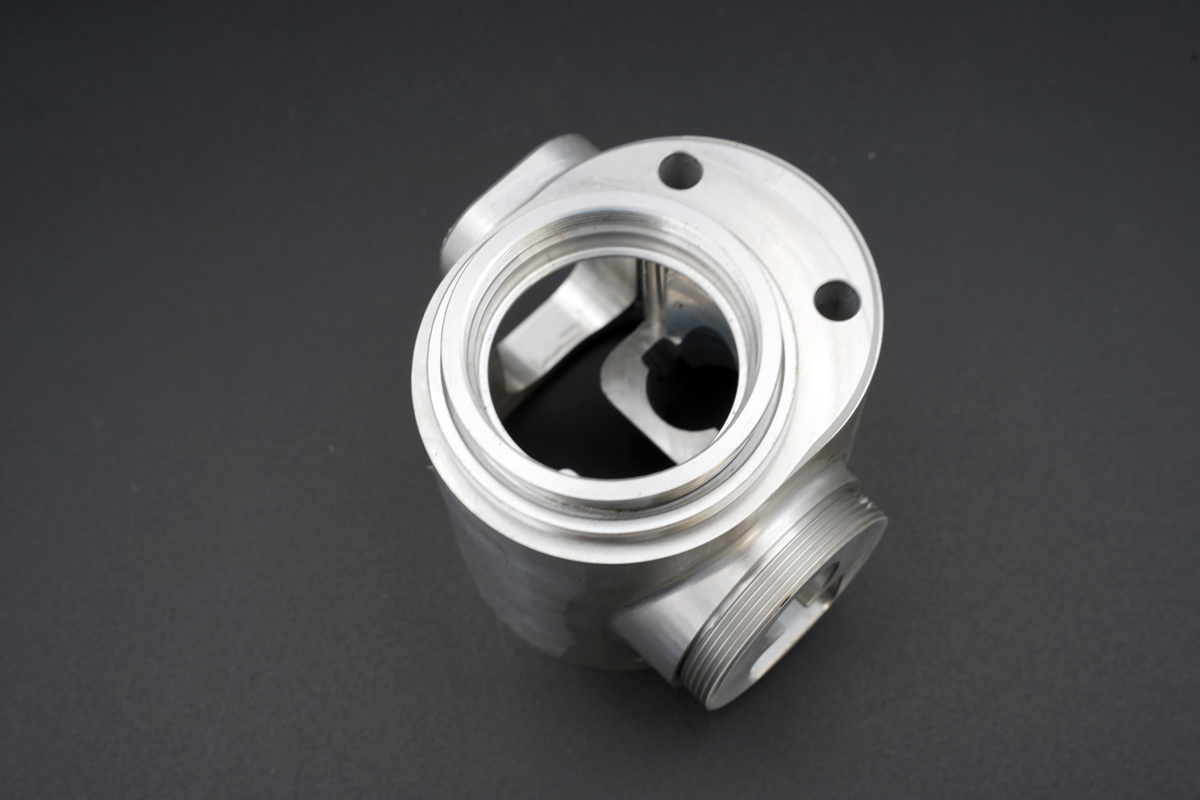
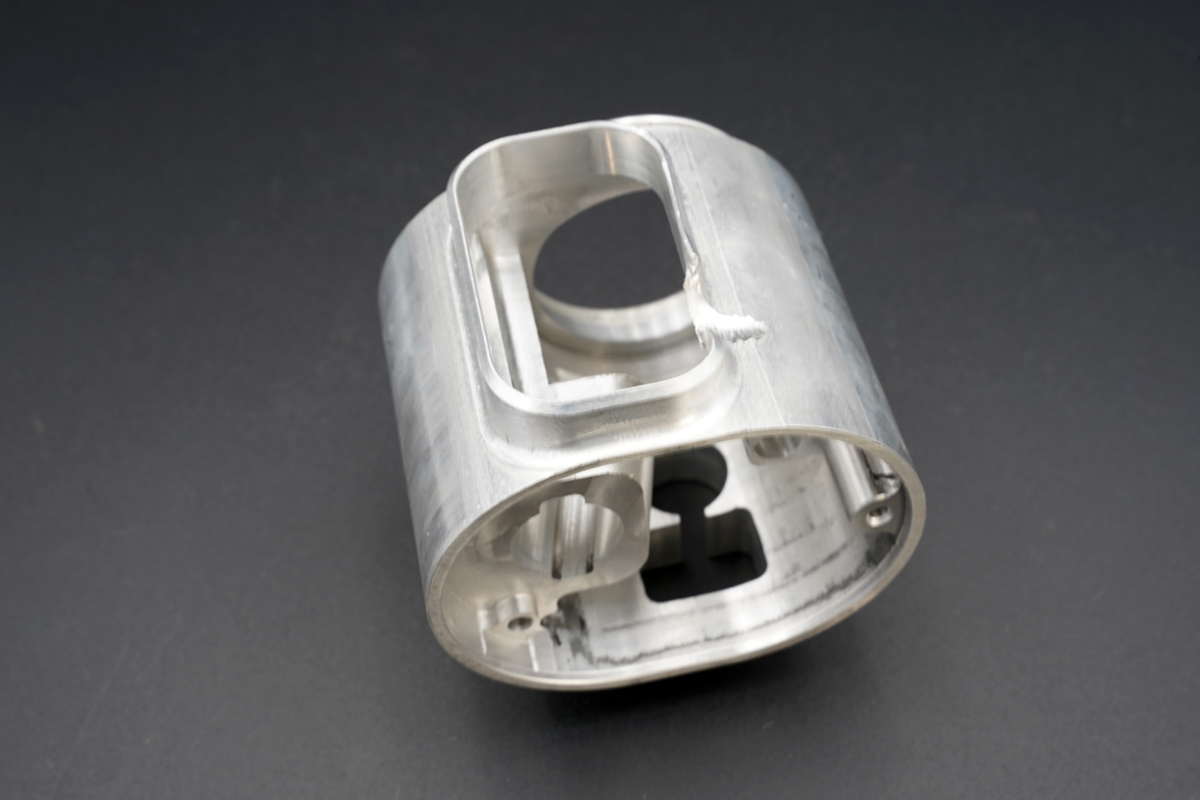
该部件是一个关键的机器人摆臂,由航空航天级7075-T6铝精密加工而成。利用先进的五轴数控铣削技术,我们实现了高性能机器人操作器所需的复杂轮廓、深凹穴和集成安装功能,确保了出色的动态稳定性和负载下的最小偏转。
| 项目名称 | 高动态机器人摆臂 |
| 材料 | 铝7075-T6 |
| 加工设备 | 五轴高速加工中心 |
| 技术 | 五轴联动数控铣削 |
| 检测仪器 | CMM、激光扫描仪、测力计 |
| 表面处理 | 精密机加工表面(Ra 0.8µm) |
| 后表面检测设备 | CMM,表面粗糙度测试仪 |
| 应用领域 | 工业机器人手臂、码垛机器人、自动化物料搬运 |
| 特性 | 规格说明 | 标准 |
|---|---|---|
| 材料与;脾气 | 7075-T6铝合金 | 美国航空4115/美国航空B209 |
| 临界孔径公差 | H7(±0.018mm) | ISO 286-2 |
| 表面光洁度(机加工后) | Ra 0.8µm | ISO 1302 |
| 屈服强度 | ≥480兆帕 | ASTM E8/E8M |
| 特征:真实位置 | Ø0.05毫米(配合孔) | ASME Y14.5 |
|
姓名 |
适用材料 |
颜色 |
可应用于 |
|
|---|---|---|---|---|
|
|
铝、钢、不锈钢 |
Ra 0.8μm-Ra 3.2μm |
所有后处理 |